This article gives information about the Linux® PWM framework.
It explains how to activate the PWM interface and, based on examples, how to use it.
1. Framework purpose[edit | edit source]
PWM (Pulse Width Modulation) framework offers a unified interface for the users to:
- control PWM output(s) such as period, duty cycle and polarity.
- capture a PWM signal and report its period and duty cycle (e.g. input).
The interface can be used from:
- user space (sysfs)
- kernel space (API)
PWMs can be used in various use cases, as mentioned in How to use the framework to control LEDs, beepers, vibrators or fans...
2. System overview[edit | edit source]
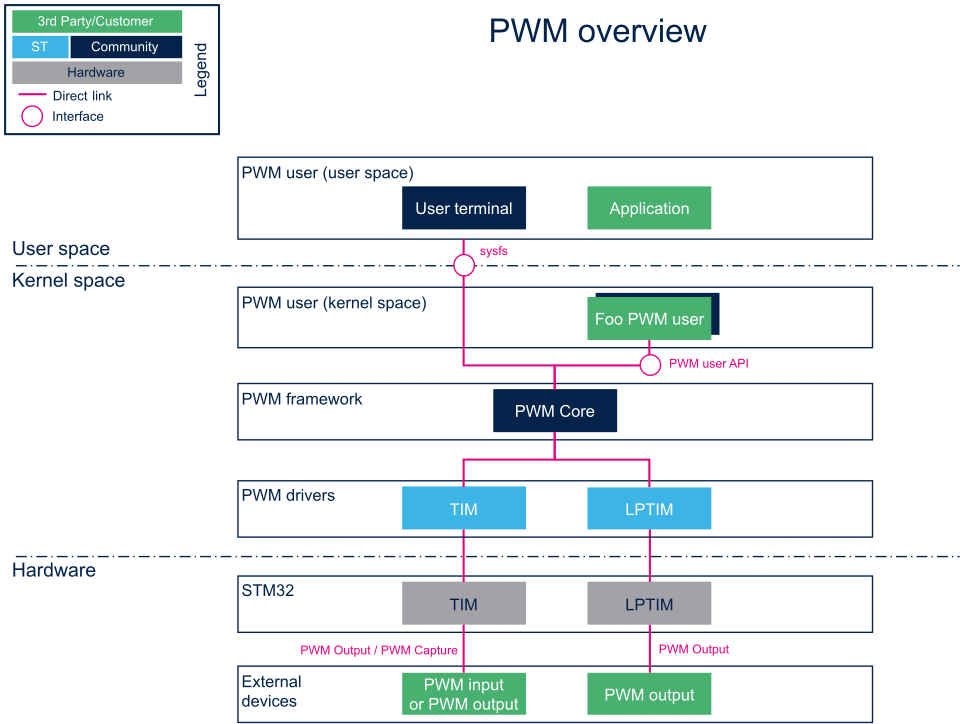
2.1. Component description[edit | edit source]
- PWM user (User space)
The user can use PWM sysfs interface, from a user terminal or a custom application, to control PWM device(s) from user space.
- PWM user (Kernel space)
User drivers can use PWM API to control PWM external device(s) from kernel space (such as back-light, vibrator, LED or fan drivers).
- PWM framework (Kernel space)
The PWM core provides sysfs interface and PWM API. They can be used to implement PWM user and PWM controller drivers.
- PWM drivers (Kernel space)
Provider drivers such as STM32 TIM Linux driver and STM32 LPTIM Linux driver that expose PWM controller(s) to the core.
- PWM hardware
PWM controller(s) such as TIM internal peripheral[1] and LPTIM internal peripheral[2] used to drive external PWM controlled devices.
2.2. API description[edit | edit source]
Documentation on PWM interface can be found under kernel Documentation/driver-api/pwm.rst[3]
2.2.1. Kernel PWM API[edit | edit source]
The main useful user API are the following:
- devm_pwm_get() or pwm_get() / pwm_put(): this API is used to look up, request, then free a PWM device.
- pwm_init_state(), pwm_get_state(), pwm_apply_state(): this API is used to initialize, retrieve and apply the current PWM device state.
- pwm_config(): this API updates the PWM device configuration (period and duty cycle).
- ...
2.2.2. Sysfs interface[edit | edit source]
In addition to Documentation/driver-api/pwm.rst[3], details on ABI are available in Documentation/ABI/testing/sysfs-class-pwm[4].
3. Configuration[edit | edit source]
3.1. Kernel configuration[edit | edit source]
Activate PWM framework in the kernel configuration through the Linux menuconfig tool, Menuconfig or how to configure kernel (CONFIG_PWM=y):
Device Drivers --->
[*] Pulse-Width Modulation (PWM) Support --->
Activate PWM drivers for STM32 PWM drivers: STM32 TIM Linux driver and/or STM32 LPTIM Linux driver
3.2. Device tree configuration[edit | edit source]
- PWM generic DT bindings:
PWM DT bindings documentation[5] describes device tree properties related to standard PWM user nodes and PWM controller nodes.
- Detailed DT configuration for STM32 internal peripherals:
TIM device tree configuration and/or LPTIM device tree configuration
4. How to use the framework[edit | edit source]
PWM can be used either from the user or the kernel space.
4.1. How to use PWM with sysfs interface[edit | edit source]
The available PWM controllers are listed in sysfs:
ls /sys/class/pwm pwmchip0
The number of channels per controller can be read in npwm (read-only)
cd /sys/class/pwm/pwmchip0 cat npwm 4
Each channel is exported (requested for sysfs activation) by writing the corresponding number in 'export'.
TIMx_CH1 is exported as "pwm0", TIMx_CH2 as "pwm1", and so on:
|
As an example, proceed as follows to export the first channel (TIMx_CH1, e.g. channel 0):
echo 0 > export ls device export npwm power pwm0 subsystem uevent unexport
The period and duty cycle must be configured before enabling any channel.
As an example, proceed as follows to set a period of 100 ms with a duty cycle of 60% on channel 0:
echo 100000000 > pwm0/period echo 60000000 > pwm0/duty_cycle echo 1 > pwm0/enable
The polarity can be inverted or set to normal by using the polarity entry:
echo "inversed" > pwm0/polarity cat pwm0/polarity inversed echo "normal" > pwm0/polarity cat pwm0/polarity normal
4.2. How to use PWM capture with sysfs interface[edit | edit source]
PWM capture is available on some PWM controllers such as TIM internal peripheral[1] (see TIM configured in PWM input capture mode ).
| PWM output and capture mode are mutually exclusive on a TIM instance |
# First export a channel (e.g. 0), then capture PWM input on it: cd /sys/class/pwm/pwmchip0 echo 0 > export cd pwm0 ls capture duty_cycle enable period polarity power uevent cat capture 10000 1002 # capture result is in nano-seconds, e.g.: 100KHz, 10% duty cycle
4.3. Example of PWM usage with kernel PWM API[edit | edit source]
Several in-kernel drivers use kernel PWM API. Below a few examples:
- pwm-beeper: drivers/input/misc/pwm-beeper.c[6] driver, Documentation/devicetree/bindings/input/pwm-beeper.yaml DT binding documentation.
- pwm-vibrator: drivers/input/misc/pwm-vibra.c[7] driver, Documentation/devicetree/bindings/input/pwm-vibrator.yaml DT binding documentation.
5. How to trace and debug the framework[edit | edit source]
5.1. How to monitor with debugfs[edit | edit source]
PWM usage can be monitored from debugfs 'pwm' entry. For example:
cd /sys/kernel/debug/ cat pwm platform/44000000.timer:pwm, 4 PWM devices <-- One timer instance exposes 4 PWM channels. pwm-0 (sysfs ): requested enabled period: 1000000 ns duty: 500000 ns polarity: normal <-- Channel 0 has been exported, enabled and configured via sysfs pwm-1 ((null) ): period: 0 ns duty: 0 ns polarity: normal pwm-2 ((null) ): period: 0 ns duty: 0 ns polarity: normal <-- Other channels aren't used currently pwm-3 ((null) ): period: 0 ns duty: 0 ns polarity: normal
5.2. Troubleshooting PWM capture[edit | edit source]
Here are some clues on how to debug possible errors in PWM capture mode.
See How to use PWM capture with sysfs interface as a pre-requisite.
cat capture cat: capture: Connection timed out
This may be due to:
- the input signal isn't recognized as a PWM input (or there's no input signal to capture).
- a wrong alternate function number is used for the input pin configuration in the device-tree.
See "TIM configured in PWM input capture mode" for further details.
cat capture cat: capture: Device or resource busy
This may be due to:
- a PWM channel on the same TIM instance is already running (in capture or output mode)
cat capture cat: capture: No such device
This may be due to:
- the DMA isn't configured properly in the device-tree.
See "TIM configured in PWM input capture mode" for further details.
cat capture cat: capture: Function not implemented
This may be due to:
- a wrong TIM instance is being used (e.g. "/sys/class/pwm/pwmchip/pwmchipN"), and it doesn't support capture (like LPTIM)
- the DMA support isn't enabled (CONFIG_DMA_ENGINE)
6. References[edit | edit source]
- ↑ 1.0 1.1 1.2 TIM internal peripheral
- ↑ LPTIM internal peripheral
- ↑ 3.0 3.1 Documentation/driver-api/pwm.rst , Pulse Width Modulation interface
- ↑ Documentation/ABI/testing/sysfs-class-pwm , Pulse Width Modulation ABI
- ↑ Documentation/devicetree/bindings/pwm/pwm.txt , PWM DT bindings documentation
- ↑ drivers/input/misc/pwm-beeper.c , Example to use kernel PWM API
- ↑ drivers/input/misc/pwm-vibra.c , Example to use kernel PWM API