This article provides basic information on the Linux® I2C system and how I2C STM32 drivers is plugged upon.
1. Framework purpose[edit | edit source]
This article aims to explain how to use I2C and more accurately:
- how to activate I2C interface on a Linux® BSP
- how to access I2C from kernel space
- how to access I2C from user space.
This article describes Linux® I2C[1] interface in master and slave modes.
An introduction to I2C[2] is proposed through this external resource.
For a slave interface description, see slave-interface[3].
2. System overview[edit | edit source]
I2C is an acronym for the “Inter-IC” bus, a simple bus protocol which is widely used where low data rate communications suffice.
I2C is the acronym for the microprocessor I2C peripheral interface.
Around the microprocessor device, the user can add many I2C external devices to create a custom board. Each external device can be accessed through the I2C from the user space or the kernel space.
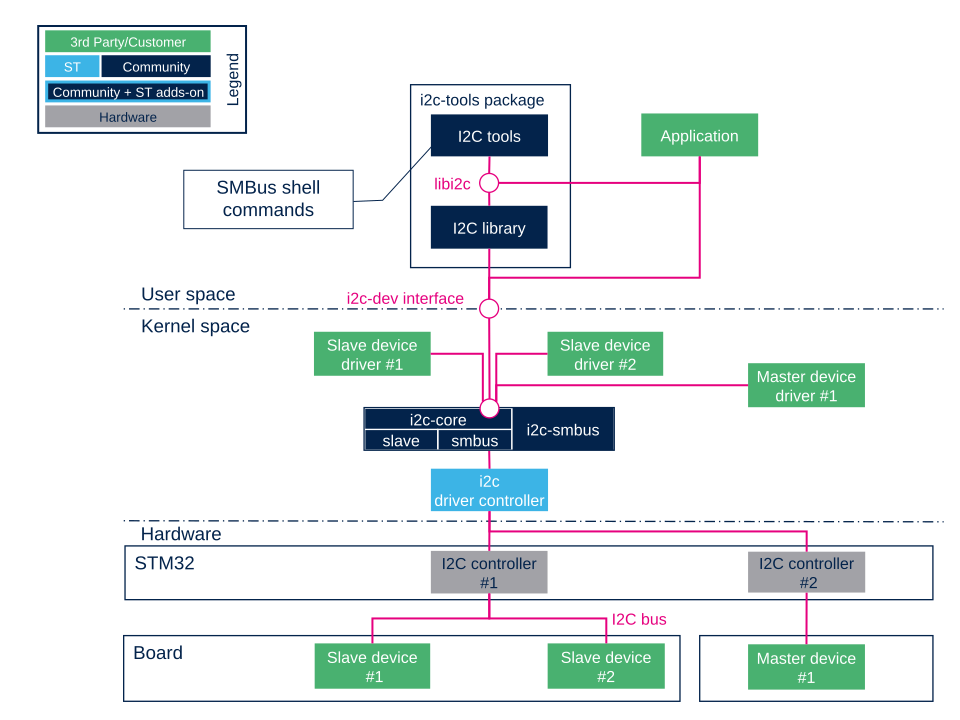
2.1. Component description[edit | edit source]
2.1.1. Board external I2C devices[edit | edit source]
- Slave devices X are physical devices (connected to STM32 via I2C bus) that behave as Slave with respect to STM32.
STM32 remains the master on the I2C bus. - Master devices X are physical devices (connected to STM32 via I2C bus) that behave as Master with respect to STM32.
STM32 behaves as a Slave in this case on the I2C bus.
2.1.2. STM32 I2C internal peripheral controller[edit | edit source]
It corresponds to STM32 I2C adapter that handles communications with any external device connected on the same bus.
It manages Slave devices (if any) and behaves as Slave if an external Master is connected.
STM32 microprocessor devices usually embed several instances of the I2C internal peripheral allowing to manage multiple I2C buses. A driver is provided that pilots the hardware.
2.1.3. i2c-stm32[edit | edit source]
The internal STM32 I2C controller driver offers ST I2C internal peripheral controller abstraction layer to i2c-core-base.
It defines all I2C transfer method algorithms to be used by I2C Core base, this includes I2C and SMBus[4] transfers API, Register/Unregister slave API and functionality check.
Even if I2C Core can emulate SMBus protocol throughout standard I2C messages, all SMBus functions are implemented within the driver.
2.1.4. i2c-core[edit | edit source]
This is the brain of the communication: it instantiates and manages all buses and peripherals.
- i2c-core as stated by its name, this is the I2C core engine but it is also in charge of parsing device tree entries for both adapter and/or devices
- i2c-core-smbus deals with all SMBus related API.
- i2c-core-slave manages I2C devices acting as slaves running in STM32.
- i2c-smbus handles specific protocol SMBus Alert. (SMBus host notification handled by I2C core base)
2.1.5. Board peripheral drivers[edit | edit source]
This layer represents all drivers associated to physical peripherals.
A peripheral driver can be compiled as a kernel module or directly into the kernel (aka built-in).
2.1.6. i2c-dev[edit | edit source]
i2c-dev is the interface between the user and the peripheral. It is a kernel driver offering I2C bus access to user space application using this dev-interface API. See examples API Description.
2.1.7. i2c-tools[edit | edit source]
I2C Tools package provides:
- shell commands to access I2C with SMBus protocol via i2c-dev
- library to use SMBus functions into a user space application
All those functions are described in this smbus-protocol API.
Note : some peripherals can work without SMBus protocol.
2.1.8. Application[edit | edit source]
An application can control all peripherals using different methods offered by I2C Tools, libI2C (I2C Tools), i2c-dev.
2.2. API description[edit | edit source]
2.2.1. libi2c[edit | edit source]
I2C tools[5] package offers a set of shell commands using mostly SMBus protocols to access I2C and an API to develop an application (libi2c).
All tools and libi2c rely on SMBus API but i2ctransfer does not since it relies on standard I2C protocol.
Tools and libi2c access SMBus and I2C API through out devfs read/write/ioctl call.
The SMBus protocols constitute a subset of the data transfer formats defined in the I2C specification.
I2C peripherals that do not comply to these protocols cannot be accessed by standard methods as defined in the SMBus specification.
See external references for further details on I2C[6] and SMBus protocol[7].
libi2c API mimics SMBus protocol[7] but at user space level.
Same API can be found in this library as in SMBus protocol[7]. All SMBus API are duplicated here with the exception of specific SMBus protocol API like SMBus Host Notify and SMBus Alert.
2.2.2. User space application[edit | edit source]
User space application is using a kernel driver (i2c-dev) which offers I2C access through devfs.
Supported system calls : open(), close(), read(), write(), ioctl(), llseek(), release().
| Constant | Description |
|---|---|
| I2C_SLAVE/I2C_SLAVE_FORCE | Sets slave address for read/write operations |
| I2C_FUNCS | Gets bus functionalities |
| I2C_TENBIT | 10bits address support |
| I2C_RDWR | Combined R/W transfer (one STOP only) |
| I2C_SMBUS | Perform an SMBus transfer instead of standard I2C |
The above commands are the main ones (more are defined in the framework): see dev-interface API[8] for complete list.
2.2.3. Kernel space peripheral driver[edit | edit source]
Kernel space peripheral driver accesses both I2C and SMBus devices and uses following I2C core API[9]
3. Configuration[edit | edit source]
3.1. Kernel configuration[edit | edit source]
Activate I2C in kernel configuration with Linux Menuconfig tool: Menuconfig or how to configure kernel.
[x] Device Drivers
[x] I2C support
[x] I2C device interface
[ ] I2C Hardware Bus support
[x] STMicroelectronics STM32F7 I2C support
This can be done manually in your kernel:
CONFIG_I2C=y CONFIG_I2C_CHARDEV=y CONFIG_I2C_STM32F7=y
If software needs SMBus specific protocols like SMBus Alert protocol and the SMBus Host Notify protocol, then add:
[x] Device Drivers
[x] I2C support
[x] I2C device interface
[ ] Autoselect pertinent helper modules
[x] SMBus-specific protocols
[ ] I2C Hardware Bus support
[x] STMicroelectronics STM32F7 I2C support
This can be done manually in your kernel:
CONFIG_I2C_SMBUS=y
3.2. Device tree configuration[edit | edit source]
Please refer to I2C device tree configuration.
4. How to use the framework[edit | edit source]
This section describes how to use the framework to access I2C peripherals.
4.1. i2c-tools package[edit | edit source]
Using I2C Tools in user space with shell commands based on the SMBus API protocol[7] makes it easy to access I2C quickly without the need to write any code.
Use case : a lot of shell commands allow detection of I2C bus and access to I2C peripherals by SMBus protocol. The package includes a library in order to use SMBus protocol into a C program.
Full explanation is available via this link.

4.2. User space application[edit | edit source]
Allows to develop an application using the i2c-dev kernel driver in user space with this device interface[8].
Use case : by loading i2c-dev module, user can access I2C through the /dev interface. Access to I2C can be done very easily with functions open(), ioctl(), read(), write() and close(). If the peripheral is compatible, SMBus protocol access is also possible using the I2C Tools library.

4.3. Kernel space driver[edit | edit source]
Allows to develop a driver compiled into the kernel or inserted as a module using this I2C core API[9]
The Linux kernel provides example about how to write an I2C client driver.[10]
Use case : control I2C peripheral with a specific driver inside the kernel space. The driver initializes all parameters while system is booting and creates an access to the peripheral data through sysfs for example.

4.4. Board description[edit | edit source]
To instantiate a peripheral, several methods exist: see instantiating devices[11] for more details.
The below information focuses on device tree, sysfs and Application Code.
4.4.1. Device tree[edit | edit source]
The device tree is a description of the hardware that is used by the kernel to know which devices are connected. In order to add a slave device on an I2C bus, complete the device tree with the information related to the new device.
Example : with an EEPROM
&i2c4 {
status = "okay";
i2c-scl-rising-time-ns = <185>;
i2c-scl-falling-time-ns = <20>;
dmas = <&mdma1 36 0x0 0x40008 0x0 0x0 0>,
<&mdma1 37 0x0 0x40002 0x0 0x0 0>;
dma-names = "rx", "tx";
eeprom@50 {
compatible = "at,24c256";
pagesize = <64>;
reg = <0x50>;
};
};
The EEPROM is now instantiated on the bus i2c-X (X depends on how many adapters are probed at runtime) at address 0x50 and it is compatible with the driver registered with the same property.
Please note the driver specifies a SCL rising/falling time as input.
Please refer to I2C device tree configuration for proper configuration and explanation.
Be aware the I2C specification reserves a range of addresses for special purposes, see slave addressing[12].
The below figure shows the relation between the device tree and how it is used :

4.4.2. sysfs[edit | edit source]
Through sysfs, i2c-core offers the possibility to instantiate and remove a peripheral:
Add a peripheral "myPeripheralName" attached to the bus x at the address 0xAA
Note that the field "myPeripheralName" should have the same name as the compatible driver string so that they match one another.
echo myPeripheralName 0xAA > i2c-x/new_device
Remove a peripheral attached to the bus x at the address 0xAA
echo 0xAA > i2c-x/delete_device
Into each driver directory (/sys/bus/i2c/drivers/at24/ for the EEPROM peripheral example), it is possible to:
bind a peripheral with a driver
echo 3-0050 > bind
unbind a peripheral with a driver
echo 3-0050 > unbind
4.4.3. Application code[edit | edit source]
Here is a minimalist code to register a new slave device onto I2C adapter without Device Tree usage.
#include <linux/i2c.h>
/* Create a device with slave address <0x42> */
static struct i2c_board_info stm32_i2c_test_board_info = {
I2C_BOARD_INFO("i2c_test07", 0x42);
};
/*
Module define creation skipped
*/
static int __init i2c_test_probe(void)
{
struct i2c_adapter *adap;
struct i2c_client *client;
/* Get I2C controller */
adap = i2c_get_adapter(i);
/* Build new devices */
client = i2c_new_device(adap,&stm32_i2c_test_board_info);
}
5. How to trace and debug the framework[edit | edit source]
In Linux® kernel, there are standard ways to debug and monitor I2C. The debug can take place at different levels: hardware and software.
5.1. How to trace[edit | edit source]
5.1.1. Dynamic trace[edit | edit source]
Detailed dynamic trace is available here How to use the kernel dynamic debug
echo "file i2c-* +p" > /sys/kernel/debug/dynamic_debug/control
This command enables all traces related to I2C core and drivers at runtime.
Nonetheless at Linux® Kernel menu configuration level, it provides the granularity for debugging: Core and/or Bus.
Device Drivers ->
[*] I2C support ->
[*] I2C Core debugging messages
[*] I2C Bus debugging messages
- I2C Core debugging messages (CONFIG_I2C_DEBUG_CORE)
Compile I2C engine with DEBUG flag. - I2C Bus debugging messages (CONFIG_I2C_DEBUG_BUS)
Compile I2C drivers with DEBUG flag.
Having both I2C Core and I2C Bus debugging messages is equivalent to using the above dynamic debug command: the dmesg output will be the same.
5.1.2. Bus snooping[edit | edit source]
Bus snooping is really convenient for viewing I2C protocol and see what has been exchanged between the STM32 and the devices.
As this debug feature uses Ftrace, please refer to the Ftrace article for enabling it.
In order to access to events for I2C bus snooping, the following kernel configuration is necessary:
Kernel hacking ->
[*] Tracers ->
[*] Trace process context switches and events
Depending on the protocol being used, it is necessary to enable i2c and/or smbus tracers as follow:
echo 1 > /sys/kernel/debug/tracing/events/i2c/enable echo 1 > /sys/kernel/debug/tracing/events/smbus/enable
Then tracing is enabled using the following command:
echo 1 > /sys/kernel/debug/tracing/tracing_on
After a transaction, trace can be read by looking at the trace file:
cat /sys/kernel/debug/tracing/trace
Here is part of the output, and how it looks like when using i2cdetect command on the i2c-0 bus:
... smbus_write: i2c-0 a=003 f=0000 c=0 QUICK l=0 [] ... smbus_result: i2c-0 a=003 f=0000 c=0 QUICK wr res=-6 ... smbus_write: i2c-0 a=004 f=0000 c=0 QUICK l=0 [] ... smbus_result: i2c-0 a=004 f=0000 c=0 QUICK wr res=-6
| Notice that i2cdetect, i2cget/i2cput, i2cdump are doing smbus protocol based transactions. |
On the contrary, below output shows the result of a transaction done in I2C protocol mode:
... i2c_write: i2c-1 #0 a=042 f=0000 l=1 [45] ... i2c_result: i2c-1 n=1 ret=1 ... i2c_write: i2c-2 #0 a=020 f=0000 l=1 [45] ... i2c_result: i2c-2 n=1 ret=1
The utilization of traces of I2C bus is well described here I2C bus snooping[13].
5.2. How to debug[edit | edit source]
5.2.1. Detect I2C configuration[edit | edit source]
5.2.1.1. sysfs[edit | edit source]
When a peripheral is instantiated, i2c-core and the kernel export different files through sysfs :
/sys/class/i2c-adapter/i2c-x shows all instantiated I2C buses with 'x' being the I2C bus number.
/sys/bus/i2c/devices lists all instantiated peripherals. For example, there is a directory named 3-0050 that corresponds to the EEPROM peripheral at address 0x50 on bus number 3.
/sys/bus/i2c/drivers lists all instantiated drivers. Directory named at24/ is the driver of EEPROM.
/sys/bus/i2c/devices/3-0050/
/ /
/ /i2c-3/3-0050/
/
/drivers/at24/3-0050/
/sys/class/i2c-adapter/i2c-0/
/i2c-1/
/i2c-2/
/i2c-3/3-0050/
/i2c-4/
/i2c-5/
5.2.2. devfs[edit | edit source]
If i2c-dev driver is compiled into the kernel, the directory dev contains all I2C bus names numbered i2c-0 to i2c-n.
/dev/i2c-0
/i2c-1
/i2c-2
/i2c-3
/i2c-4
/i2c-n
5.2.3. i2c-tools[edit | edit source]
Check all I2C instantiated adapters:
i2cdetect -l
See i2c-tools for full description.
6. Source code location[edit | edit source]
- I2C Framework driver is in drivers/i2c
- I2C STM32 Driver is in drivers/i2c/busses/i2c-stm32f7.c
- User API for I2C bus is in include/uapi/linux/i2c.h and I2C dev is include/uapi/linux/i2c-dev.h .
7. To go further[edit | edit source]
Bootlin has written a nice walkthrough article: Building a Linux system for the STM32MP1: connecting an I2C sensor[14]
8. References[edit | edit source]
- ↑ http://www.i2c-bus.org/
- ↑ https://bootlin.com/doc/training/linux-kernel/
- ↑ Documentation/i2c/slave-interface.rst slave interface description
- ↑ https://www.i2c-bus.org/smbus/
- ↑ https://i2c.wiki.kernel.org/index.php/I2C_Tools
- ↑ Documentation/i2c/summary.rst I2C and SMBus summary
- ↑ 7.0 7.1 7.2 7.3 Documentation/i2c/smbus-protocol.rst SMBus protocol summary
- ↑ 8.0 8.1 Documentation/i2c/dev-interface.rst dev-interface API
- ↑ 9.0 9.1 I2C and SMBus Subsystem
- ↑ Implementing I2C device drivers
- ↑ Documentation/i2c/instantiating-devices.rst How to instantiate I2C devices
- ↑ http://www.totalphase.com/support/articles/200349176-7-bit-8-bit-and-10-bit-I2C-Slave-Addressing Slave addressing
- ↑ https://linuxtv.org/wiki/index.php/Bus_snooping/sniffing#i2c I2C Bus Snooping
- ↑ https://bootlin.com/blog/building-a-linux-system-for-the-stm32mp1-connecting-an-i2c-sensor/