This message will disappear after all relevant tasks have been resolved.
Semantic MediaWiki
There are 1 incomplete or pending task to finish installation of Semantic MediaWiki. An administrator or user with sufficient rights can complete it. This should be done before adding new data to avoid inconsistencies.
Based on STM32 MC Motor Pilot 5.Y.2 V0.9.7 (included in STM32 MC-SDK 5.Y.2).
1. Overview of the STM32 MC motor-pilot tool
STM32 MC Motor Pilot is a monitoring tool for STM32 motor-control applications:
- Connects to MC applications built with the UI module through the serial port
- Uses the same protocol as the current monitor
- Allows for controlling, monitoring, and tuning MC applications
- Will replace the monitor part of STM32 MC workbench
- Current available version is an already usable preview

STM32 MC Motor Pilot added values:
- Enhanced plotting feature: the user can now plot most registers
- The user can easily customize GUI at run time
- To fit specific needs or to experiment with new firmware features
- Solid foundation to support future firmware features
- ACIM, 6-Step, Sensorless Zero speed, enhanced debug features
- Runs on all three MCD target platforms: Windows, Mac, and Linux
2. STM32 MC Motor Pilot Quick Guide
2.1. Installation and Run
STM32 MC Motor Pilot is now automatically installed with STM32 MC SDK.
A shortcut is now created in Windows menus to run it.
2.2. Quick Start-up
2.2.1. Quick step 1
- MotorPilot:
- Starts unconnected

- Lists available serial ports

- Displays the default UI
- Starts unconnected
- Connect a Motor Pilot board to the PC
- Click on Connect

2.2.2. Quick step 2
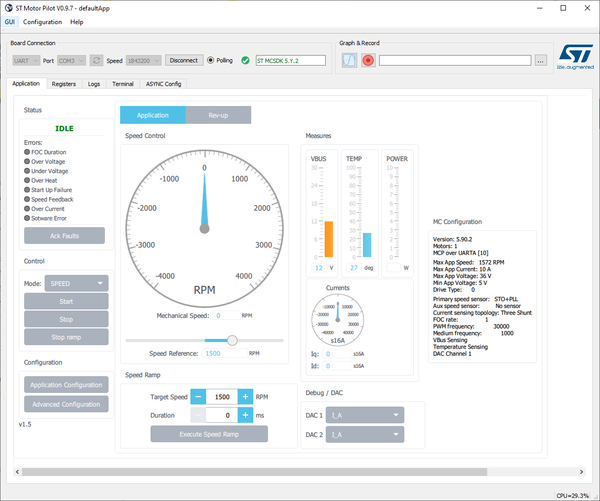
- MotorPilot is connected:
- Displays version of embedded firmware

- Shows the current state and the errors
- Displays version of embedded firmware
- Spin the motor:
- Click on the Start button

- Click on the Start button
- Motors starts and the monitor displays the speed

- And the currents
- And other information


2.2.3. Quick step 3
- Control the motor
- Slide the knob to set the speed
- Set Target Speed, Duration and Click to apply a ramp
- Slide the knob to set the speed


- Click Stop Ramp to stop it before end
- Click Stop to stop spinning the motor
- Click Stop Ramp to stop it before end

3. MC application parameters
STM32 MC Motor Pilot gets MC application parameters from the board and adapts widgets to them.
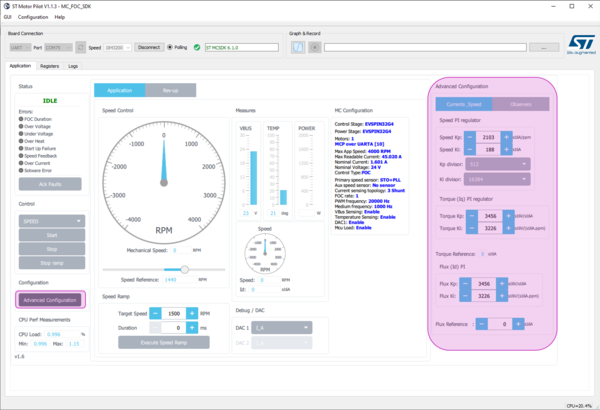
4. MC application advanced settings
4.1. Speed PID, Toque PID, Flux PID and Flux reference
- Click Advanced Configuration
- Displays additional panel with more settings
- Displays additional panel with more settings
- As in the current monitor, customizes:
- Speed PID
- Toque PID
- Flux PID
- Set Flux reference

4.2. State Observer, PLL parameters, CORDIC parameters and DAC settings
- Click Advanced Configuration
- Displays additional panel with more settings
- As in the current monitor, customizes:
- State Observer + PLL parameters
- State Observer + CORDIC parameters
- Missing from the current monitor:
- Revup phases configuration
- Will be present in future versions of the tool
- Revup phases configuration
- DAC settings are at the bottom left

4.3. Handling Errors
4.3.1. Control Board disconnection
Board freeze due to firmware critical error or breakpoint trigger:
- Resume execution or reset the board, and the connection will resume

4.3.2. Firmware errors
- As with the current monitor, current and past errors are indicated.
- Clicking the Ack Faults button has no effect in the FAULT_NOW state

- Wait for the fault conditions to vanish to enter the FAULT_OVER state
- Then click on Ack Faults to go back to IDLE


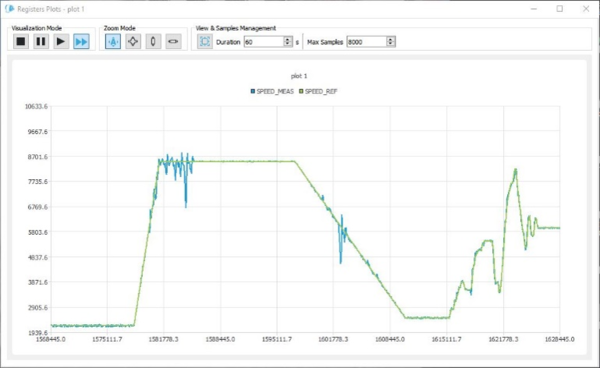
4.4. Viewing and plotting registers by pooling (low-speed plotting)
- Clicking the Registers tab displays the list of all registers
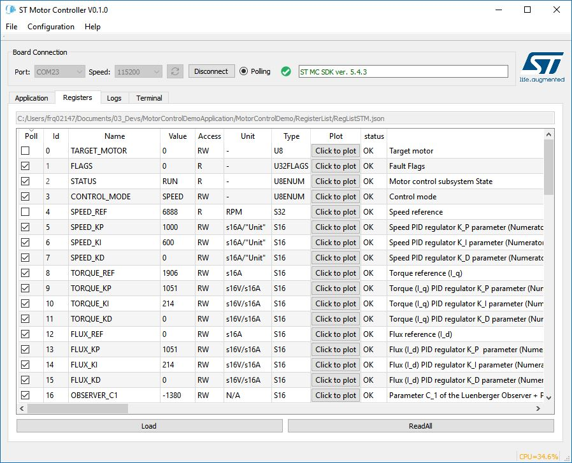
- Clicking a Click to Plot button
- Opens a plot window the first time
- Lets the user decide where to plot the other times
- Lets the user choose to stop showing the already pointed register.
- Lets the user decide where to plot the other times


4.4.1. And soon in this start-up guide:
- Viewing and plotting registers by pooling for high-speed plotting
- frame logger and decoder
4.5. UI is changeable at run-time
- Click on menu item File => Load
- Search for a .qml file and open it.
- For instance, GUI\PositionControlApp.qml found in the release
- This will load a new GUI with other features
- In the case of PositionControlApp.qml, a position control enabled monitoring application.
- Future versions of the tool will let users change this UI themselves

5. Current limitations and future plans
5.1. Missing features to be added soon
- Revup configuration UI
- Dual Drive support
- Filtering and sorting registers’ view
- UI API description and development guide
- To let users customize the UI for their own needs