This article explains how to experiment with Coral Edge TPU[1] applications for object detection based on the COCO SSD MobileNet v1 model using the TensorFlow Lite C++ API.
1. Description[edit source]
The object detection[2] neural network model allows identification and localization of a known object within an image.
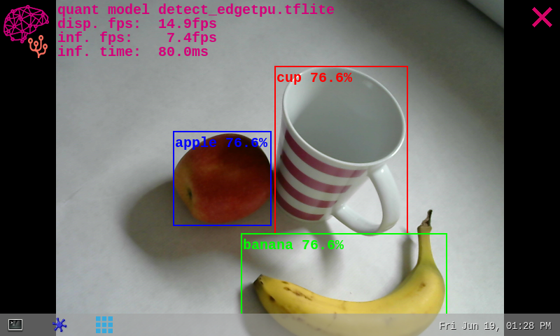
The application demonstrates a computer vision use case for object detection where frames are grabbed from a camera input (/dev/videox) and analyzed by a neural network model executed on the Coral Edge TPU[1] using the TensorFlow Lite C++ API.
A Gstreamer pipeline is used to stream camera frames (using v4l2src), to display a preview (using waylandsink) and to execute a neural network inference (using appsink).
The result of the inference is displayed on the preview. The overlay is done using GtkWidget with cairo.
This combination is quite simple and efficient in terms of CPU overhead.
The model used with this application is the COCO SSD MobileNet v1 downloaded from the object detection overview[2] and converted for the Coral Edge TPU.
2. Installation[edit source]
2.1. Install from the OpenSTLinux AI package repository[edit source]
After having configured the AI OpenSTLinux package you can install X-LINUX-AI components for this application:
apt-get install tflite-cv-apps-edgetpu-object-detection-c++
Then restart the demo launcher:
systemctl restart weston@root
2.2. Source code location[edit source]
- in the Openembedded OpenSTLinux Distribution:
- <Distribution Package installation directory>/layers/meta-st/meta-st-stm32mpu-ai/recipes-samples/tflite-cv-apps-edgetpu/files/object-detection/src
- on GitHub:
2.3. Re-generate the package from OpenSTLinux Distribution (optional)[edit source]
Using the Openembedded OpenSTLinux distribution, you are able to rebuild the application.
- Set up the build environment:
cd <Distribution Package installation directory>
source layers/meta-st/scripts/envsetup.sh
- Rebuild the application:
bitbake tflite-cv-apps-edgetpu-object-detection-c++ -c compile
The generated binary is available here:
<Distribution Package installation directory>/<build directory>/tmp-glibc/work/cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi/tflite-cv-apps-edgetpu-object-detection-c++/1.0-r0/tflite-cv-apps-edgetpu-object-detection-c++-1.0/object-detection/src
3. How to use the application[edit source]
3.1. Launching via the demo launcher[edit source]

{kind=link}
{kind=link}
3.2. Execute with the command line[edit source]
The objdetect_tfl_edgetpu_gst_gtk C/C++ application is located in the userfs partition:
/usr/local/demo-ai/computer-vision/tflite-object-detection-edgetpu/bin/objdetect_tfl_edgetpu_gst_gtk
It accepts the following input parameters:
Usage: ./objdetect_tfl_edgetpu_gst_gtk -m <model .tflite> -l <label .txt file>
-m --model_file <.tflite file path>: .tflite model to be executed
-l --label_file <label file path>: name of file containing labels
-i --image <directory path>: image directory with image to be classified
-v --video_device <n>: video device (default /dev/video0)
--crop: if set, the nn input image is cropped (with the expected nn aspect ratio) before being resized,
else the nn imput image is only resized to the nn input size (could cause picture deformation).
--frame_width <val>: width of the camera frame (default is 640)
--frame_height <val>: height of the camera frame (default is 480)
--framerate <val>: framerate of the camera (default is 15fps)
--input_mean <val>: model input mean (default is 127.5)
--input_std <val>: model input standard deviation (default is 127.5)
--help: show this help
3.3. Testing with COCO SSD MobileNet V1[edit source]
The model used for test is the detect_edgetpu.tflite downloaded from the object detection overview[2] and converted for the Coral Edge TPU. If you are interested, please take a look at how this model has been converted.
To ease launching of the application, two shell scripts are available:
- launch object detection based on camera frame inputs
/usr/local/demo-ai/computer-vision/tflite-object-detection-edgetpu/bin/launch_bin_objdetect_tfl_edgetpu_coco_ssd_mobilenet.sh
- launch object detection based on the pictures located in /usr/local/demo-ai/computer-vision/models/mobilenet/testdata directory
/usr/local/demo-ai/computer-vision/tflite-object-detection-edgetpu/bin/launch_bin_objdetect_tfl_edgetpu_coco_ssd_mobilenet.sh
4. References[edit source]