This article describes how to get and use the Developer Package of the STM32MPU Embedded Software for any development platform of the STM32MP1 Series' (STM32MP15 boards and STM32MP13 boards), in order to modify some of its pieces of software, or to add applications on top of it.
It lists some prerequisites in terms of knowledges and development environment, and gives the step-by-step approach to download and install the STM32MPU Embedded Software components for this Package.
Finally, it proposes some guidelines to upgrade (add, remove, configure, improve...) any piece of software.
1. Developer Package content[edit source]
If you are not yet familiar with the STM32MPU Embedded Software distribution and its Packages, read the following articles:
- Which STM32MPU Embedded Software Package better suits your needs (and especially the Developer Package chapter)
- STM32MPU Embedded Software distribution
If you are already familiar with the Developer Package for the STM32MPU Embedded Software distribution, the fast links to essential commands might interest you.
To sum up, this Developer Package provides:
- for the OpenSTLinux distribution (development on Arm® Cortex®-A processor):
- the software development kit (SDK), based on Yocto SDK, for cross-development on an host PC
- the following pieces of software in source code:
- Linux® kernel
- gcnano-driver
- U-Boot
- Trusted Firmware-A (TF-A)
- Open source Trusted Execution Environment (OP-TEE)
- the debug symbol files for Linux® kernel, U-Boot and TF-A
- for the STM32CubeMPU Package (development on Arm® Cortex®-M processor for STM32MP15x lines
 only):
only):
- all pieces of software (BSP, HAL, middlewares and applications) in source code
- the integrated development environment (IDE) (STM32CubeIDE)
Note that, the application frameworks for the OpenSTLinux distribution are not available as source code in this Package.

2. Developer Package step-by-step overview[edit source]
The steps to get the STM32MPU Embedded Software Developer Package ready for your developments, are:
☐ Checking the prerequisites
☐ Installing the Starter Package for your board
☐ Installing the components to develop software running on Arm® Cortex®-A (OpenSTLinux distribution)
- ☐ Installing the SDK (mandatory for any development on Arm® Cortex®-A)
- ☐ Installing the OpenSTLinux BSP package (mandatory only if you plan to modify the Linux kernel, to add external out-of-tree Linux kernel modules, to modify U-Boot, TF-A, OP-TEE OS)
- ☐ Installing the debug symbol files (mandatory only if you plan to debug Linux® kernel, U-Boot, OP-TEE or TF-A with GDB)
☐ Installing the components to develop software running Arm Cortex-M (STM32CubeMPU Package)
- ☐ Installing STM32CubeIDE (mandatory for any development on Arm® Cortex®-M)
- ☐ Installing the STM32CubeMPU Package (mandatory only if you plan to modify the STM32Cube firmware)
Once these steps are achieved, you are able to:
- develop software running on Arm Cortex-A
- develop software running on Arm Cortex-M4 ( only on STM32MP15x lines )
3. Checking the prerequisites[edit source]
3.1. Knowledges[edit source]
The STM32MP1 Developer Package aims at enriching a Linux-based software for the targeted product: basic knowledges about Linux are recommended to make the most of this Package.
Having a look at the STM32MPU Embedded Software architecture overview is also highly recommended.
3.2. Development setup[edit source]
The recommended setup for the development PC (host) is specified in the following article: PC prerequisites.
Whatever the development platform (board) and development PC (host) used, the range of possible development setups is illustrated by the picture below.
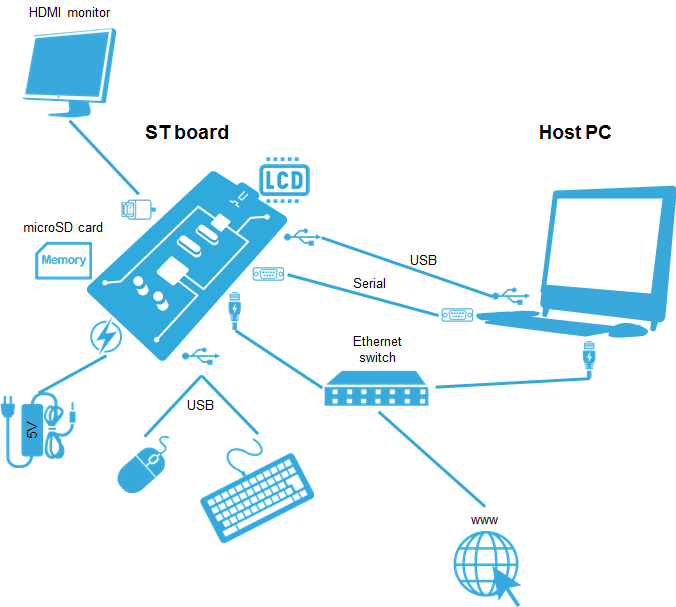
{kind=link}
The following components are mandatory:
- Host PC for cross-compilation and cross-debugging, installed as specified above
- Board assembled and configured as specified in the associated Starter Package article
- Mass storage device (for example, microSD card) to load and update the software images (binaries)
The following components are optional, but recommended:
- A serial link between the host PC (through Terminal program) and the board for traces (even early boot traces), and access to the board from the remote PC (command lines)
- An Ethernet link between the host PC and the board for cross-development and cross-debugging through a local network. This is an alternative or a complement to the serial (or USB) link
- A display connected to the board, depending on the technologies available on the board: DSI LCD display, HDMI monitor (or TV) and so on
- A mouse and a keyboard connected through USB ports
Additional optional components can be added by means of the connectivity capabilities of the board: cameras, displays, JTAG, sensors, actuators, and much more.
4. Installing the Starter Package[edit source]
Before developing with the Developer Package, it is essential to start up your board thanks to its Starter Package. All articles relative to Starter Packages are found in Category:Starter Package: find the one that corresponds to your board, and follow the installation instructions (if not yet done), before going further.
In brief, it means that:
- your board boots successfully
- the flashed image comes from the same release of the STM32MPU Embedded Software distribution than the components that will be downloaded in this article
Thanks to the Starter Package, all Flash partitions are populated.
Then, with the Developer Package, it is possible to modify or to upgrade the partitions independently one from the others.
For example, if you only want to modify the Linux kernel (part of bootfs partition), installing the SDK and the Linux kernel are enough; no need to install anything else.
5. Installing the components to develop software running on Arm Cortex-A (OpenSTLinux distribution)[edit source]
5.1. Installing the SDK[edit source]
Optional step: it is mandatory only if you want to modify or add software running on Arm Cortex-A (e.g. Linux kernel, Linux user space applications...).
The SDK for OpenSTLinux distribution provides a stand-alone cross-development toolchain and libraries tailored to the contents of the specific image flashed in the board. If you want to know more about this SDK, read the SDK for OpenSTLinux distribution article.
The STM32MP1 SDK is delivered through a tarball file named : en.SDK-x86_64-stm32mp1-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23.tar.gz
Download and install the STM32MP1 SDK. The software package is provided AS IS, and by downloading it, you agree to be bound to the terms of the software license agreement (SLA). The detailed content licenses can be found here.
| STM32MP1 Developer Package SDK - STM32MP1-Ecosystem-v4.1.0 release | |
|---|---|
| Download |
You need to be logged on my.st.com before accessing the following link: |
| Installation |
tar xvf en.SDK-x86_64-stm32mp1-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23.tar.gz
chmod +x stm32mp1-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23/sdk/st-image-weston-openstlinux-weston-stm32mp1-x86_64-toolchain-4.0.4-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23.sh
./stm32mp1-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23/sdk/st-image-weston-openstlinux-weston-stm32mp1-x86_64-toolchain-4.0.4-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23.sh -d <working directory absolute path>/Developer-Package/SDK
ST OpenSTLinux - Weston - (A Yocto Project Based Distro) SDK installer version 4.0.4-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23 =================================================================================================================================== You are about to install the SDK to "<working directory absolute path>/Developer-Package/SDK". Proceed [Y/n]? Extracting SDK.........................................................................................................................................................................................................................done Setting it up...done SDK has been successfully set up and is ready to be used. Each time you wish to use the SDK in a new shell session, you need to source the environment setup script e.g. $ . <working directory absolute path>/Developer-Package/SDK/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi |
| Release note |
Details about the content of the SDK are available in the associated STM32 MPU ecosystem release note.
|
- The SDK is in the <SDK installation directory>:
<SDK installation directory> SDK for OpenSTLinux distribution: details in Standard SDK directory structure article ├── environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi Environment setup script for Developer Package ├── site-config-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi ├── sysroots │ ├── cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi Target sysroot (libraries, headers, and symbols) │ │ └── [...] │ └── x86_64-ostl_sdk-linux Native sysroot (libraries, headers, and symbols) │ └── [...] └── version-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi
5.1.1. Starting up the SDK[edit source]
The SDK environment setup script must be run once in each new working terminal in which you cross-compile:
source <SDK installation directory>/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi
The following checkings allow to ensure that the environment is correctly setup:
- Check the target architecture
echo $ARCH
arm
- Check the toolchain binary prefix for the target tools
echo $CROSS_COMPILE
arm-ostl-linux-gnueabi-
- Check the C compiler version
$CC --version
arm-ostl-linux-gnueabi-gcc (GCC) <GCC version>
[...]
- Check that the SDK version is the expected one
echo $OECORE_SDK_VERSION <expected SDK version>
If any of these commands fails or does not return the expected result, try to reinstall the SDK.
5.2. Installing the OpenSTLinux BSP packages[edit source]
Optional step: it is mandatory only if you want to modify the BSP (Linux kernel, TF-A, U-Boot, OP-TEE OS), or to add external out-of-tree Linux kernel modules.
The software package is provided AS IS, and by downloading it, you agree to be bound to the terms of the software license agreement (SLA). The detailed content licenses can be found here.
- The OpenSTLinux BSP package is delivered through a tarball file named en.SOURCES-stm32mp1-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23.tar.gz for STM32MP157x-EV1
 , STM32MP157x-DKx and STM32MP135x-DK boards.
, STM32MP157x-DKx and STM32MP135x-DK boards.
- Download and install the STM32MP1 OpenSTLinux BSP package.
| STM32MP1 Developer Package - STM32MP1 ecosystem v4.1.0 release | |
|---|---|
| Download |
Log on my.st.com before accessing the following link: |
| Installation |
cd <working directory path>/Developer-Package tar xvf en.SOURCES-stm32mp1-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23.tar.gz
|
| Release note |
Details about the content of the OpenSTLinux BSP package are available in the associated STM32 MPU OpenSTLinux release note.
|
- In the <Developer Package installation directory>/, a tarball archive of the OpenSTLinux BSP components can be found.
- The Linux kernel installation directory is named linux-stm32mp-<kernel version>:
linux-stm32mp-5.15.67-stm32mp-r2-r0 Linux kernel installation directory ├── [*].patch ST patches to apply during the Linux kernel preparation (see next chapter) ├── fragment-[*].config ST configuration fragments to apply during the Linux kernel configuration (see next chapter) ├── linux-5.15.67.tar.xz Tarball file of the Linux kernel source code ├── README.HOW_TO.txt Helper file for Linux kernel management: reference for Linux kernel build └── series List of all ST patches to apply
- The gcnano driver installation directory is named gcnano-driver-stm32mp-<gcnano driver version>:
gcnano-driver-stm32mp-6.4.9-stm32mp-r2-r0 gcnano-driver installation directory ├── gcnano-driver-stm32mp-6.4.9-stm32mp-r2-r0.tar.xz Tarball file of the gcnano-driver source code └── README.HOW_TO.txt Helper file for gcnano-driver management: reference for gcnano-driver build
- The U-Boot installation directory is named u-boot-stm32mp-<U-Boot version>:
u-boot-stm32mp-v2021.10-stm32mp-r2-r0 U-Boot installation directory ├── [*].patch ST patches to apply during the U-Boot preparation (see next chapter) ├── u-boot-stm32mp-v2021.10-stm32mp-r2 U-Boot source code directory ├── Makefile.sdk Makefile for the U-Boot compilation ├── README.HOW_TO.txt Helper file for U-Boot management: reference for U-Boot build ├── series List of all ST patches to apply └── u-boot-stm32mp-v2021.10-stm32mp-r2-r0.tar.xz Tarball file of the U-Boot source code
- The TF-A installation directory is named tf-a-stm32mp-<TF-A version>:
tf-a-stm32mp-v2.6-stm32mp-r2-r0 TF-A installation directory ├── [*].patch ST patches to apply during the TF-A preparation (see next chapter) ├── tf-a-stm32mp-v2.6-stm32mp-r2 TF-A source code directory ├── Makefile.sdk Makefile for the TF-A compilation ├── README.HOW_TO.txt Helper file for TF-A management: reference for TF-A build ├── series List of all ST patches to apply └── tf-a-stm32mp-v2.6-stm32mp-r2-r0.tar.xz Tarball file of the TF-A source code
- The OP-TEE installation directory is named optee-os-stm32mp-<OP-TEE version>:
optee-os-stm32mp-3.16.0-stm32mp-r2-r0 OP-TEE installation directory ├── [*].patch ST patches to apply during the OP-TEE preparation (see next chapter) ├── optee-os-stm32mp-3.16.0-stm32mp-r2 OP-TEE source code directory ├── fonts.tar.gz fonts for OPTEE-OS ├── Makefile.sdk Makefile for the OP-TEE compilation ├── optee-os-stm32mp-3.16.0-stm32mp-r2-r0.tar.xz Tarball file of the OP-TEE source code ├── README.HOW_TO.txt Helper file for OP-TEE management: reference for OP-TEE build └── series List of all ST patches to apply
- The FIP artifacts directory is named FIP_artifacts:
FIP_artifacts ├── arm-trusted-firmware │ ├── bl32 │ │ ├── stm32mp15[*] Device tree for TF-A → STM32MP15 boards │ │ └── tf-a-bl32-stm32mp15.bin Binary file for bl32 stage │ ├── fwconfig │ │ ├── stm32mp13[*]-fw-config-optee.dtb Device tree for FW config → STM32MP13 boards │ │ └── stm32mp15[*]-fw-config-optee.dtb Device tree for FW config → STM32MP15 boards │ ├── metada.bin Store boot information │ ├── tf-a-stm32mp13[*].stm32 FSBL binary→ STM32MP13 boards │ └── tf-a-stm32mp15[*].stm32 FSBL binary → STM32MP15 boards ├── optee │ ├── tee-header_v2-stm32mp13[*].bin Binary file for OP-TEE OS → STM32MP13 boards │ ├── tee-header_v2-stm32mp15[*].bin Binary file for OP-TEE OS → STM32MP15 kits │ ├── tee-pageable_v2-stm32mp13[*].bin Binary file for OP-TEE OS → STM32MP13 boards │ ├── tee-pageable_v2-stm32mp15[*].bin Binary file for OP-TEE OS → STM32MP15 boards │ ├── tee-pager_v2-stm32mp13[*].bin Binary file for OP-TEE OS → STM32MP13 boards │ └── tee-pager_v2-stm32mp15[*].bin Binary file for OP-TEE OS → STM32MP15 boards └── u-boot ├── u-boot-nodtb-stm32mp13.bin ├── u-boot-nodtb-stm32mp15.bin ├── u-boot-stm32mp13[*].dtb Device tree for U-Boot → STM32MP13 boards └── u-boot-stm32mp15[*].dtb Device tree for U-Boot → STM32MP15 boards
- The debug symbol files are located under the <Developer Package installation directory>/stm32mp1-openstlinux-5.15-yocto-kirkstone-mp1-v22.11.23/images/stm32mp1 directory:
5.2.1. Building and deploying the Linux kernel for the first time[edit source]
Prerequisite: the SDK is installed. It is mandatory to execute once the steps specified below before modifying the Linux kernel, or adding external out-of-tree Linux kernel modules.
The partitions related to the Linux kernel are:
- the bootfs partition that contains the Linux kernel U-Boot image (uImage) and device tree
- the rootfs partition that contains the Linux kernel modules
The Linux kernel might be cross-compiled, either in the source code directory, or in a dedicated directory different from the source code directory.
This last method is recommended as it clearly separates the files generated by the cross-compilation from the source code files.
Open the <Linux kernel installation directory>/README.HOW_TO.txt helper file, and execute its instructions to:
☐ setup a software configuration management (SCM) system (git) for the Linux kernel (optional but recommended)
☐ prepare the Linux kernel (applying the ST patches)
☐ configure the Linux kernel (applying the ST fragments)
☐ cross-compile the Linux kernel
☐ deploy the Linux kernel (i.e. update the software on board)
The Linux kernel is now installed: let's modify the Linux kernel, or add external out-of-tree Linux kernel modules.
5.2.2. Building and deploying the gcnano-driver for the first time (only on STM32MP15x lines )[edit source]
Prerequisite:
- the SDK is installed.
- the Linux kernel is built as explained here
It is mandatory to execute once the steps specified below before modifying gcnano-driver.
A kernel module depends on the Linux kernel version. If kernel module is not built with the correct Linux kernel, the kernel could refuse the module to be loaded.
Open the <gcnano-driver installation directory>/README.HOW_TO.txt helper file, and execute its instructions to:
☐ setup a software configuration management (SCM) system (git) for the gcnano-driver (optional but recommended)
☐ cross-compile the gcnano-driver
☐ deploy the gcnano-driver (i.e. update the software on board)
The gcnano-driver is now installed.
5.2.3. Building and deploying the U-Boot for the first time[edit source]
Prerequisite: the SDK is installed. It is mandatory to execute once the steps specified below before modifying the U-Boot.
As explained in the boot chain overview, the trusted boot chain is the default solution delivered by STMicroelectronics.
Within this scope, the partition related to the U-Boot is the ssbl one that contains the U-Boot and its device tree blob.
Open the <U-Boot installation directory>/README.HOW_TO.txt helper file, and execute its instructions to:
☐ setup a software configuration management (SCM) system (git) for the U-Boot (optional but recommended)
☐ prepare the U-Boot (applying the ST patches)
☐ cross-compile the U-Boot
☐ deploy the U-Boot (i.e. update the software on board)
The U-Boot is now installed: let's modify the U-Boot.
5.2.4. Building and deploying the TF-A for the first time[edit source]
Prerequisite: the SDK is installed. It is mandatory to execute once the steps specified below before modifying the TF-A.
As explained in the boot chain overview, the trusted boot chain is the default solution delivered by STMicroelectronics.
Within this scope, the partition related to the TF-A is the fsbl one.
Open the <TF-A installation directory>/README.HOW_TO.txt helper file, and execute its instructions to:
☐ setup a software configuration management (SCM) system (git) for the TF-A (optional but recommended)
☐ prepare the TF-A (applying the ST patches)
☐ cross-compile the TF-A
☐ deploy the TF-A (i.e. update the software on board)
The TF-A is now installed: let's modify the TF-A.
5.2.5. Building and deploying the OP-TEE for the first time[edit source]
Prerequisite: the SDK is installed. It is mandatory to execute once the steps specified below before modifying the OP-TEE.
As explained in the boot chain overview, the trusted boot chain is the default solution delivered by STMicroelectronics. Within this scope, the partition related to the OP-TEE is the fsbl one.
Open the <OP-TEE installation directory>/README.HOW_TO.txt helper file, and execute its instructions to:
☐ setup a software configuration management (SCM) system (git) for the OP-TEE (optional but recommended)
☐ prepare the OP-TEE (applying the ST patches)
☐ cross-compile the OP-TEE
☐ deploy the OP-TEE (i.e. update the software on board)
The OP-TEE is now installed: let's modify the OP-TEE.
5.3. Installing the debug symbol files[edit source]
Optional step: it is mandatory only if you want to debug Linux® kernel, U-Boot, OP-TEE or TF-A with GDB.
5.3.1. Using the debug symbol files[edit source]
These files are used to debug the Linux® kernel, U-Boot, OP-TEE or TF-A with GDB. Especially, the Debug OpenSTLinux BSP components chapter explains how to load the debug symbol files in GDB.
6. Installing the components to develop software running on Arm Cortex-M4 (STM32CubeMPU Package) ( only on STM32MP15x lines )[edit source]
6.1. Installing STM32CubeIDE[edit source]
Optional step: it is needed if you want to modify or add software running on Arm Cortex-M.
The table below explains how to download and install STM32CubeIDE which addresses STM32 MCU, and also provides support for Cortex-M inside STM32 MPU.
STM32 MPU support, inside STM32CubeIDE, is available on Linux® and Windows® host PCs, but it is NOT on macOS®.
| STM32CubeIDE for Linux® host PC | STM32CubeIDE for Windows® host PC | |
|---|---|---|
| Download |
Version 1.12.0
|
Version 1.12.0
|
| Installation guide | ||
| User manual | ||
| Detailed release note |
| |
Minor releases may be available from the update site. Check chapter 10 in (UM2609) for more information on how to update STM32CubeIDE.
6.2. Installing the STM32CubeMPU Package[edit source]
Optional step: it is mandatory only if you want to modify the STM32CubeMPU Package.
Prerequisite: the STM32CubeIDE is installed.
- The STM32CubeMP1 Package is delivered through an archive file named en.STM32Cube_FW_MP1_V1.6.0.zip.
- Download and install the STM32CubeMP1 Package
The software package is provided AS IS, and by downloading it, you agree to be bound to the terms of the software license agreement (SLA). The detailed content licenses can be found here.
.
| STM32MP1 Developer Package STM32CubeMP1 Package - v4.1.0 release | |
|---|---|
| Download |
You need to be logged on my.st.com before accessing the following link: |
| Installation |
cd <working directory path>/Developer-Package
unzip en.STM32Cube_FW_MP1_V1.6.0.zip
|
| Release note |
Details about the content of the STM32CubeMP1 Package are available in the STM32Cube_FW_MP1_V1.6.0/Release_Notes.html file.
|
- The STM32CubeMP1 Package installation directory is in the <Developer Package installation directory> directory, and is named STM32Cube_FW_MP1_V1.6.0:
STM32Cube_FW_MP1_V1.6.0 STM32CubeMP1 Package: details in STM32CubeMP1 Package content article ├── Drivers │ ├── BSP BSP drivers for the supported STM32MP1 boards │ │ └── [...] │ ├── CMSIS │ │ └── [...] │ └── STM32MP1xx_HAL_Driver HAL drivers for the supported STM32MP1 devices │ └── [...] ├── _htmresc │ └── [...] ├── License.md ├── Middlewares │ └── [...] ├── package.xml ├── Projects │ ├── STM32CubeProjectsList.html List of examples and applications for STM32CubeMP1 Package │ ├── STM32MP157C-DK2 Set of examples and applications → STM32MP15 Discovery kits │ │ └── [...] │ └── STM32MP157C-EV1 Set of examples and applications → STM32MP15 Evaluation boards │ └── [...] ├── Readme.md ├── Release_Notes.html Release note for STM32CubeMP1 Package └── Utilities └── [...]
The STM32CubeMPU Package is now installed: let's develop software running on Arm Cortex-M4.
7. Developing software running on Arm Cortex-A7[edit source]
7.1. Modifying the Linux kernel[edit source]
Prerequisites:
The <Linux kernel installation directory>/README.HOW_TO.txt helper file gives the commands to:
☐ configure the Linux kernel
☐ cross-compile the Linux kernel
☐ deploy the Linux kernel (that is, update the software on board)
You can refer to the following simple examples:
- Modification of the kernel configuration
- Modification of the device tree
- Modification of a built-in device driver
- Modification of an external in-tree module
7.2. Adding external out-of-tree Linux kernel modules[edit source]
Prerequisites:
Most device drivers (or modules) in the Linux kernel can be compiled either into the kernel itself (built-in, or internal module) or as Loadable Kernel Modules (LKMs, or external modules) that need to be placed in the root file system under the /lib/modules directory. An external module can be in-tree (in the kernel tree structure), or out-of-tree (outside the kernel tree structure).
External Linux kernel modules are compiled taking reference to a Linux kernel source tree and a Linux kernel configuration file (.config).
Thus, a makefile for an external Linux kernel module points to the Linux kernel directory that contains the source code and the configuration file, with the "-C <Linux kernel path>" option.
This makefile also points to the directory that contains the source file(s) of the Linux kernel module to compile, with the "M=<Linux kernel module path>" option.
A generic makefile for an external out-of-tree Linux kernel module looks like the following:
# Makefile for external out-of-tree Linux kernel module # Object file(s) to be built obj-m := <module source file(s)>.o # Path to the directory that contains the Linux kernel source code # and the configuration file (.config) KERNEL_DIR ?= <Linux kernel path> # Path to the directory that contains the generated objects DESTDIR ?= <Linux kernel installation directory> # Path to the directory that contains the source file(s) to compile PWD := $(shell pwd) default: $(MAKE) -C $(KERNEL_DIR) M=$(PWD) modules install: $(MAKE) -C $(KERNEL_DIR) M=$(PWD) INSTALL_MOD_PATH=$(DESTDIR) modules_install clean: $(MAKE) -C $(KERNEL_DIR) M=$(PWD) clean
Such module is then cross-compiled with the following commands:
$ make clean
$ make
$ make install
You can refer to the following simple example:
7.3. Adding Linux user space applications[edit source]
Prerequisites:
- the SDK is installed
- the SDK is started up
Once a suitable cross-toolchain (OpenSTLinux SDK) is installed, it is easy to develop a project outside of the OpenEmbedded build system.
There are different ways to use the SDK toolchain directly, among which Makefile and Autotools.
Whatever the method, it relies on:
- the sysroot that is associated with the cross-toolchain, and that contains the header files and libraries needed for generating binaries (see target sysroot)
- the environment variables created by the SDK environment setup script (see SDK startup)
You can refer to the following simple example:
7.4. Modifying the U-Boot[edit source]
Prerequisites:
The <U-Boot installation directory>/README.HOW_TO.txt helper file gives the commands to:
☐ cross-compile the U-Boot
☐ deploy the U-Boot (that is, update the software on board)
You can refer to the following simple example:
7.5. Modifying the TF-A[edit source]
Prerequisites:
The <TF-A installation directory>/README.HOW_TO.txt helper file gives the commands to:
☐ cross-compile the TF-A
☐ deploy the TF-A (that is, update the software on board)
You can refer to the following simple example:
7.6. Modifying the OP-TEE[edit source]
Prerequisites:
The <OP-TEE installation directory>/README.HOW_TO.txt helper file gives the commands to:
☐ cross-compile the OP-TEE
☐ deploy the OP-TEE (that is, update the software on board)
You can refer to the following simple example:
8. Developing software running on Arm Cortex-M4 ( only on STM32MP15x lines )[edit source]
8.1. How to create a STM32CubeMPU project from scratch or open/modify an existing one from STM32CubeMPU package[edit source]
Refer to STM32CubeMP1 Package article.
9. Fast links to essential commands[edit source]
If you are already familiar with the Developer Package for the STM32MPU Embedded Software distribution, fast links to the essential commands are listed below.
10. How to go further?[edit source]
Now that your developments are ready, you might want to switch to the STM32MP1 Distribution Package, in order to create your own distribution and to generate your own SDK and image.
Arm® is a registered trademark of Arm Limited (or its subsidiaries) in the US and/or elsewhere. ![]()
Arm® is a registered trademark of Arm Limited (or its subsidiaries) in the US and/or elsewhere. ![]()