1 Das U-Boot[edit source]
Das U-Boot ("the Universal Boot Loader" or U-Boot) is an open-source bootloader that can be used on ST boards to initialize the platform and load the Linux® kernel.
- Official website: https://www.denx.de/wiki/U-Boot
- Official manual: U-Boot project documentation and https://www.denx.de/wiki/DULG/Manual
- Official source code is available under git repository at [1]
Read the README file before starting using U-Boot. It covers the following topics:
- source file tree structure
- description of CONFIG defines
- instructions for building U-Boot
- brief description of the Hush shell
- list of common environment variables
Do go further, read the documentations available in doc/ and the documentation generated by make htmldocs [1].
2 U-Boot overview[edit source]
{kind=link}
{kind=link}
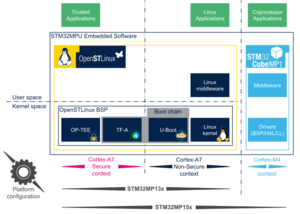
The STM32 MPU boot chain uses Trusted Firmware-A (TF-A) as FSBL and U-Boot as SSBL.
The same U-Boot source can also generate an alternate FSBL named SPL. The boot chain becomes: SPL as FSBL and U-Boot as SSBL.
2.1 SPL: alternate FSBL[edit source]
2.1.1 SPL description[edit source]
The U-Boot SPL or SPL is an alternate first stage bootloader (FSBL).
It is a small binary (bootstrap utility) generated from the U-Boot source and stored in the internal limited-size embedded RAM. SPL main features are the following:
- It is loaded by the ROM code.
- It performs the initial CPU and board configuration (clocks and DDR memory).
- It loads the SSBL (U-Boot) into the DDR memory.
2.1.2 SPL restrictions[edit source]
SPL is provided only as an example of the simplest FSBL with the objective to support upstream U-Boot development. However, several known limitations have been identified when SPL is used in conjunction with the minimal secure monitor provided within U-Boot for basic boot chain. These limitations apply to:
- power management
- secure access to registers
- limited features (STM32CubeProgrammer / boot from NAND Flash memory)
- SCMI support for clock and reset (not compatible with latest Linux kernel device tree)
There is no workaround for these limitations.
2.1.3 SPL execution sequence[edit source]
SPL executes the following main steps in SYSRAM:
- board_init_f(): driver initialization including DDR initialization (mininimal stack and heap: CONFIG_SPL_STACK_R_MALLOC_SIMPLE_LEN)
- configuration of heap in DDR memory (CONFIG_SPL_SYS_MALLOC_F_LEN)
- board_init_r(): initialization of the other drivers activated in the SPL device tree
- loading and execution of U-Boot (or Kernel in Falcon mode[2]: README.falcon ).
2.2 U-Boot: SSBL[edit source]
2.2.1 U-Boot description[edit source]
U-Boot is the second-stage bootloader (SSBL) of boot chain for STM32 MPU platforms.
SSBL main features are the following:
- It is configurable and expendable.
- It features a simple command line interface (CLI), allowing users to interact over a serial port console.
- It provides scripting capabilities.
- It loads the kernel into RAM and gives control to the kernel.
- It manages several internal and external devices such as NAND and NOR Flash memories, Ethernet and USB.
- It supports the following features and commands:
- File systems: FAT, UBI/UBIFS, JFFS
- IP stack: FTP
- Display: LCD, HDMI, BMP for splashcreen
- USB: host (mass storage) or device (DFU stack)
2.2.2 U-Boot execution sequence[edit source]
U-Boot executes the following main steps in DDR memory:
- Pre-relocation initialization (common/board_f.c): minimal initialization (such as CPU, clock, reset, DDR and console) running at the CONFIG_SYS_TEXT_BASE load address.
- Relocation: copy of the code to the end of DDR memory.
- Post-relocation initialization:(common/board_r.c): initialization of all the drivers.
- Command execution through autoboot (CONFIG_AUTOBOOT) or console shell.
- Execution of the boot command (by default bootcmd=CONFIG_BOOTCOMMAND):
for example, execution of the commandbootmto:- load and check images (such as kernel, device tree and ramdisk)
- fixup the kernel device tree
- install the secure monitor (optional) or
- pass the control to the Linux kernel (or to another target application)
- Execution of the boot command (by default bootcmd=CONFIG_BOOTCOMMAND):
3 U-Boot configuration[edit source]
The U-Boot binary configuration is based on
- Kbuild infrastructure (as in Linux Kernel, you can use
make menuconfigin U-Boot)
The configurations are based on:- options defined in Kconfig files (CONFIG_ compilation flags)
- the selected configuration file: configs/stm32mp*_defconfig
- other compilation flags defined in include/configs/stm32mp*.h (these flags are progressively migrated to Kconfig)
The file name is configured through CONFIG_SYS_CONFIG_NAME.
For STM32MP15x lines , the include/configs/stm32mp1.h file is used.
, the include/configs/stm32mp1.h file is used.
- DeviceTree: U-Boot binaries include a device tree blob that is parsed at runtime
All the configuration flags (prefixed by CONFIG_) are described in the source code, either in the README file or in the documentation directory .
For example, CONFIG_SPL activates the SPL compilation.
Hence to compile U-Boot, select the <target> and the device tree for the board in order to choose a predefined configuration.
Refer to #U-Boot_build for examples.
3.1 Kbuild[edit source]
Like the kernel, the U-Boot build system is based on configuration symbols (defined in Kconfig files). The selected values are stored in a .config file located in the build directory, with the same makefile target. .
Proceed as follows:
- Select a predefined configuration (defconfig file in configs directory ) and generate the first .config:
make <config>_defconfig.
- Change the U-Boot compile configuration (modify .config) by using one of the following five
makecommands:
make menuconfig --> menu based program make config --> line-oriented configuration make xconfig --> QT program[3] make gconfig --> GTK program make nconfig --> ncurse menu based program
You can then compile U-Boot with the updated .config.
Warning: the modification is performed locally in the build directory. It will be lost after a make distclean.
Save your configuration to be able to use it as a defconfig file:
make savedefconfig
This target saves the current config as a defconfig file in the build directory. It can then be compared with the predefined configuration (configs/stm32mp*defconfig).
The other makefile targets are the following:
make help
....
Configuration targets:
config - Update current config utilising a line-oriented program
nconfig - Update current config utilising a ncurses menu based
program
menuconfig - Update current config utilising a menu based program
xconfig - Update current config utilising a Qt based front-end
gconfig - Update current config utilising a GTK+ based front-end
oldconfig - Update current config utilising a provided .config as base
localmodconfig - Update current config disabling modules not loaded
localyesconfig - Update current config converting local mods to core
defconfig - New config with default from ARCH supplied defconfig
savedefconfig - Save current config as ./defconfig (minimal config)
allnoconfig - New config where all options are answered with no
allyesconfig - New config where all options are accepted with yes
allmodconfig - New config selecting modules when possible
alldefconfig - New config with all symbols set to default
randconfig - New config with random answer to all options
listnewconfig - List new options
olddefconfig - Same as oldconfig but sets new symbols to their
default value without prompting
3.2 Device tree[edit source]
Refer to doc/README.fdt-control for details.
The board device tree has the same binding as the kernel. It is integrated within the U-Boot binaries: u-boot.bin
- By default, it is appended at the end of the code (CONFIG_OF_SEPARATE).
- It can be embedded in the U-Boot binary (CONFIG_OF_EMBED). This is particularly useful for debugging since it enables easy .elf file loading.
The U-Boot device tree (u-boot.dtb) can be also provided as external file loaded by FSBL when U-Boot code is started (u-boot-nodtb.bin: code without device tree): device tree address is provided as boot parameter (in r2 register).
A default device tree is available in the defconfig file (by setting CONFIG_DEFAULT_DEVICE_TREE).
You can either select another supported device tree using the DEVICE_TREE make flag. For stm32mp boards, the corresponding file is <dts-file-name>.dts in arch/arm/dts/stm32mp*.dts , with <dts-file-name> set to the full name of the board:
make DEVICE_TREE=<dts-file-name>
or provide a device tree blob (dtb file) resulting from the dts file compilation, by using the EXT_DTB option:
make EXT_DTB=boot/<dts-file-name>.dtb
The SPL device tree is also generated from this device tree. However to reduce its size, the U-Boot makefile uses the fdtgrep tool to parse the full U-Boot DTB and identify all the drivers required by SPL.
To do this, U-Boot uses specific device-tree flags to determine if the associated driver is initialized prior to U-Boot relocation and/or if the associated node is present in SPL :
- u-boot,dm-pre-reloc => present in SPL, initialized before relocation in U-Boot
- u-boot,dm-pre-proper => initialized before relocation in U-Boot
- u-boot,dm-spl => present in SPL
In the device tree used by U-Boot, these flags need to be added in all the nodes used in SPL or in U-Boot before relocation, and for all used handles (clock, reset, pincontrol).
To obtain a device tree file <dts-file-name>.dts that is identical to the Linux kernel one, these U-Boot properties are only added for ST boards in the add-on file <dts-file-name>-u-boot.dtsi. This file is automatically included in <dts-file-name>.dts during device tree compilation (this is a generic U-Boot Makefile behavior).
4 U-Boot command line interface (CLI)[edit source]
Refer to U-Boot Command Line Interface.
If CONFIG_AUTOBOOT is activated, you have CONFIG_BOOTDELAY seconds (2s by default, 1s for ST configuration) to enter the console by pressing any key, after the line below is displayed and bootcmd is executed (CONFIG_BOOTCOMMAND):
Hit any key to stop autoboot: 2
4.1 Commands[edit source]
The commands are defined in cmd/*.c . They are activated through the corresponding CONFIG_CMD_* configuration flag.
Use the help command in the U-Boot shell to list the commands available on your device:
help
Below the list of all commands extracted from U-Boot Manual (not-exhaustive):
- Information Commands
- bdinfo - prints Board Info structure
- coninfo - prints console devices and information
- flinfo - prints Flash memory information
- iminfo - prints header information for application image
- help - prints online help
- Memory Commands
- base - prints or sets the address offset
- crc32 - checksum calculation
- cmp - memory compare
- cp - memory copy
- md - memory display
- mm - memory modify (auto-incrementing)
- mtest - simple RAM test
- mw - memory write (fill)
- nm - memory modify (constant address)
- loop - infinite loop on address range
- Flash Memory Commands
- cp - memory copy
- flinfo - prints Flash memory information
- erase - erases Flash memory
- protect - enables or disables Flash memory write protection
- mtdparts - defines a Linux compatible MTD partition scheme
- Execution Control Commands
- source - runs a script from memory
- bootm - boots application image from memory
- go - starts application at address 'addr'
- Download Commands
- bootp - boots image via network using BOOTP/TFTP protocol
- dhcp - invokes DHCP client to obtain IP/boot params
- loadb - loads binary file over serial line (kermit mode)
- loads - loads S-Record file over serial line
- rarpboot- boots image via network using RARP/TFTP protocol
- tftpboot- boots image via network using TFTP protocol
- Environment Variables Commands
- printenv- prints environment variables
- saveenv - saves environment variables to persistent storage
- setenv - sets environment variables
- run - runs commands in an environment variable
- bootd - default boot, that is run 'bootcmd'
- Flattened Device Tree support
- fdt addr - selects the FDT to work on
- fdt list - prints one level
- fdt print - recursive printing
- fdt mknode - creates new nodes
- fdt set - sets node properties
- fdt rm - removes nodes or properties
- fdt move - moves FDT blob to new address
- fdt chosen - fixup dynamic information
- Special Commands
- i2c - I2C sub-system
- Storage devices
- Miscellaneous Commands
- echo - echoes args to console
- reset - performs a CPU reset
- sleep - delays the execution for a predefined time
- version - prints the monitor version
To add a new command, refer to doc/README.commands .
4.2 U-Boot environment variables[edit source]
The U-Boot behavior is configured through environment variables.
Refer to Manual and README / Environment Variables.
On the first boot, U-Boot uses a default environment embedded in the U-Boot binary. You can modify it by changing the content of CONFIG_EXTRA_ENV_SETTINGS in your configuration file (for example ./include/configs/stm32mp1.h) (see README / - Default Environment).
This environment can be modified and saved in the boot device. When it is present, it is loaded during U-Boot initialization:
- To boot from e•MMC/SD card (CONFIG_ENV_IS_IN_MMC): at the end of the partition indicated by config field "u-boot,mmc-env-partition" in device-tree (partition named "ssbl" for ST boards).
- To boot from NAND Flash memory (CONFIG_ENV_IS_IN_UBI): in the two UBI volumes "config" (CONFIG_ENV_UBI_VOLUME) and "config_r" (CONFIG_ENV_UBI_VOLUME_REDUND).
- To boot from NOR Flash memory (CONFIG_ENV_IS_IN_SPI_FLASH): the u-boot_env mtd parttion (at offset CONFIG_ENV_OFFSET).
4.2.1 env command[edit source]
The env command allows displaying, modifying and saving the environment in U-Boot console.
help env env - environment handling commands Usage: env default [-f] -a - [forcibly] reset default environment env default [-f] var [...] - [forcibly] reset variable(s) to their default values env delete [-f] var [...] - [forcibly] delete variable(s) env edit name - edit environment variable env exists name - tests for existence of variable env print [-a | name ...] - print environment env print -e [name ...] - print UEFI environment env run var [...] - run commands in an environment variable env save - save environment env set -e name [arg ...] - set UEFI variable; unset if 'arg' not specified env set [-f] name [arg ...]
Example: proceed as follows to restore the default environment and save it. This is useful after a U-Boot upgrade:
env default -a env save
You can also use the command activated by CONFIG_CMD_ERASEENV:
env erase
4.2.2 bootcmd[edit source]
"bootcmd" variable is the autoboot command. It defines the command executed when U-Boot starts (CONFIG_BOOTCOMMAND).
For stm32mp, CONFIG_BOOTCOMMAND="run bootcmd_stm32mp":
env print bootcmd bootcmd=run bootcmd_stm32mp
"bootcmd_stm32mp" is a script that selects the command to be executed for each boot device (see ./include/configs/stm32mp1.h), based on generic distro scripts:
- To boot from a serial/usb device: execute the
stm32progcommand. - To boot from an e•MMC, SD card: boot only on the same device (bootcmd_mmc...).
- To boot from a NAND Flash memory: boot on ubifs partition on the NAND memory (bootcmd_ubi0).
- To boot from a NOR Flash memory: use the SD card (on SDMMC 0 on ST boards with bootcmd_mmc0)
env print bootcmd_stm32mp
You can then change this configuration:
- either permanently in your board file
- default environment by CONFIG_EXTRA_ENV_SETTINGS (see ./include/configs/stm32mp1.h)
- change CONFIG_BOOTCOMMAND value in your defconfig
CONFIG_BOOTCOMMAND="run bootcmd_mmc0"
CONFIG_BOOTCOMMAND="run distro_bootcmd"
- or temporarily in the saved environment:
env set bootcmd run bootcmd_mmc0 env save
Note: To reset the environment to its default value:
env default bootcmd env save
4.3 Generic Distro configuration[edit source]
Refer to doc/README.distro for details.
This feature is activated by default on ST boards (CONFIG_DISTRO_DEFAULTS):
- one boot command (bootmcd_xxx) exists for each bootable device.
- U-Boot is independent from the Linux distribution used.
- bootcmd is defined in ./include/config_distro_bootcmd.h
When DISTRO is enabled, the command that is executed by default is include/config_distro_bootcmd.h :
bootcmd=run distro_bootcmd
This script tries any device found in the 'boot_targets' variable and executes the associated bootcmd.
Example for mmc0, mmc1, mmc2, pxe and ubifs devices:
bootcmd_mmc0=setenv devnum 0; run mmc_boot bootcmd_mmc1=setenv devnum 1; run mmc_boot bootcmd_mmc2=setenv devnum 2; run mmc_boot bootcmd_pxe=run boot_net_usb_start; dhcp; if pxe get; then pxe boot; fi bootcmd_ubifs0=setenv devnum 0; run ubifs_boot
U-Boot searches for an extlinux.conf configuration file for each bootable device. This file defines the kernel configuration to be used with bootm command:
- bootargs
- files to start the OS:
- kernel (uImage) + device tree + ramdisk files (optional)
- FIT image, including all these needed files (for details see doc/uImage.FIT/howto.tx )
4.4 U-Boot scripting capabilities[edit source]
"Script files" are command sequences that are executed by the U-Boot command interpreter. This feature is particularly useful to configure U-Boot to use a real shell (hush) as command interpreter.
See U-Boot script manual for an example.
5 U-Boot build[edit source]
See U-Boot Documentation.
5.1 Prerequisites[edit source]
- a PC with Linux and tools:
- U-Boot source code
git clone https://github.com/STMicroelectronics/u-boot
- from the Mainline U-Boot in official GIT repository [6]
git clone https://source.denx.de/u-boot/u-boot.git
5.2 ARM cross compiler[edit source]
A cross compiler [7] must be installed on your Host (X86_64, i686, ...) for the ARM targeted Device architecture. In addition, the $PATH and $CROSS_COMPILE environment variables must be configured in your shell.
You can use gcc for ARM, available in:
- the SDK toolchain (see Cross-compile with OpenSTLinux SDK)
PATH and CROSS_COMPILE are automatically updated. - an existing package
For example, install gcc-arm-linux-gnueabihf on Ubuntu/Debian: ( sudo apt-get. - an existing toolchain:
- latest gcc toolchain provided by arm (https://developer.arm.com/open-source/gnu-toolchain/gnu-a/downloads/)
- gcc v7 toolchain provided by linaro: (https://www.linaro.org/downloads/)
For example, to use gcc-arm-9.2-2019.12-x86_64-arm-none-linux-gnueabihf.tar.xz from arm, extract the toolchain in $HOME and update your environment with:
export PATH=$HOME/gcc-arm-9.2-2019.12-x86_64-arm-none-linux-gnueabihf/bin:$PATH export CROSS_COMPILE=arm-none-linux-gnueabihf-
For example, to use gcc-linaro-7.2.1-2017.11-x86_64_arm-linux-gnueabi.tar.xz
from https://releases.linaro.org/components/toolchain/binaries/7.2-2017.11/arm-linux-gnueabi/
Unzip the toolchain in $HOME and update your environment with:
export PATH=$HOME/gcc-linaro-7.2.1-2017.11-x86_64_arm-linux-gnueabi/bin:$PATH export CROSS_COMPILE=arm-linux-gnueabi-
5.3 Compilation[edit source]
In the U-Boot source directory, select the defconfig for the <target> and the <device tree> for your board and then execute the make all command:
make <target>_defconfig make DEVICE_TREE=<device tree> all
Use help to list other targets than all:
make help
Optionally
- KBUILD_OUTPUT can be used to change the output build directory in order to compile several targets in the source directory. For example:
export KBUILD_OUTPUT=<path>
- DEVICE_TREE can also be exported to your environment when only one board is supported. For example:
export DEVICE_TREE=<device-tree>
The result is the following:
export KBUILD_OUTPUT=<path> export DEVICE_TREE=<device tree> make <target>_defconfig make all
Examples from STM32MP15 U-Boot:
The boot chain for STM32MP15x lines ![]() use stm32mp15_trusted_defconfig:
use stm32mp15_trusted_defconfig:
make stm32mp15_trusted_defconfig make DEVICE_TREE=stm32mp157f-dk2 all
export KBUILD_OUTPUT=../build/stm32mp15_trusted export DEVICE_TREE=stm32mp157c-ev1 make stm32mp15_trusted_defconfig make all
5.4 Output files[edit source]
The resulting U-Boot files are located in your build directory (U-Boot or KBUILD_OUTPUT).
Since ecosystem release v3.0.0 , two U-Boot files are used by ST boards to generate FIP used by FSBL TF-A, with or without OP-TEE support:
- BL33_CFG=u-boot.dtb : the U-Boot device tree, selected by DEVICE_TREE, loaded by TF-A BL2 and amended by secure monitor (SPMIN or OP-TEE)
- BL33=u-boot-nodtb.bin: the U-Boot executable, loaded by TF-A BL2 started by secure monitor with BL33_CFG as parameter
Nota: All the compiled device tree are available in $KBUILD_OUTPUT/arch/arm/dts/*.dtb.
You can select them as BL33_CFG without U-Boot recompilation.
See TF-A_overview for FIP details.
The file used to debug with gdb is
- u-boot : elf file for U-Boot
For ecosystem release ≤ v2.1.0 : u-boot.stm32 : U-Boot binary with STM32 image header, including device tree selected by DEVICE_TREE, loaded by TF-A
This behavior can be restored if you activate CONFIG_STM32MP15x_STM32IMAGE in your defconfig of ecosystem release v3.0.0
This temporary option is only introduced to facilitate the FIP migration but it will be removed in the next EcosystemRelease.
The STM32 image format (*.stm32) is managed by mkimage U-Boot tools and Signing_tool. It is requested by ROM code and TF-A without FIP support (see STM32 header for binary files for details).
6 References[edit source]
- ↑ https://u-boot.readthedocs.io/en/stable/index.html
- ↑ https://www.denx.de/wiki/pub/U-Boot/MiniSummitELCE2013/2013-ELCE-U-Boot-Falcon-Boot.pdf
- ↑ https://en.wikipedia.org/wiki/Xconfig
- ↑ https://github.com/STMicroelectronics/u-boot/releases
- ↑ https://github.com/STMicroelectronics/u-boot
- ↑ https://source.denx.de/u-boot/u-boot.git or https://github.com/u-boot/u-boot
- ↑ https://en.wikipedia.org/wiki/Cross_compiler
Arm® is a registered trademark of Arm Limited (or its subsidiaries) in the US and/or elsewhere. ![]()