This article explains how to experiment with Coral Edge TPU[1] applications for object detection based on the COCO SSD MobileNet v1 model using TensorFlow Lite Python runtime.
1 Description[edit source]
The object detection[2] neural network model allows identification and localization of a known object within an image.
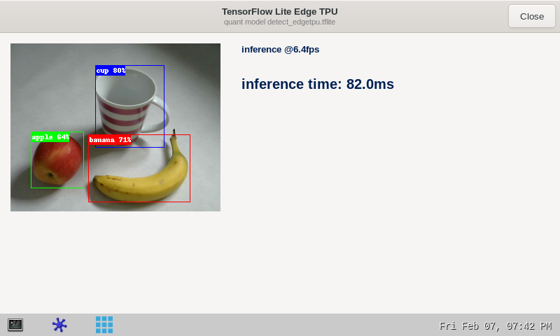
The application enables OpenCV camera streaming (or test data picture) and the Coral Edge TPU[1] TensorFlow Lite[3] interpreter runing the NN inference based on the camera (or test data pictures) inputs.
The user interface is implemented using Python GTK.
The model used with this application is the COCO SSD MobileNet v1 downloaded from the object detection overview[2] and converted for the Coral Edge TPU.
2 Installation[edit source]
2.1 Install from the OpenSTLinux AI package repository[edit source]
After having configured the AI OpenSTLinux package you can install X-LINUX-AI components for this application:
apt-get install tflite-cv-apps-edgetpu-object-detection-python
Then restart the demo launcher:
systemctl restart weston@root
2.2 Source code location[edit source]
The objdetect_tfl_edgetpu.py Python script is available:
- in the Openembedded OpenSTLinux Distribution with X-LINUX-AI Expansion Package:
- <Distribution Package installation directory>/layers/meta-st/meta-st-stm32mpu-ai/recipes-samples/tflite-cv-apps-edgetpu/files/object-detection/python/objdetect_tfl_edgetpu.py
- on the target:
- /usr/local/demo-ai/computer-vision/tflite-object-detection-edgetpu/python/objdetect_tfl_edgetpu.py
- on GitHub:
3 How to use the application[edit source]
3.1 Launching via the demo launcher[edit source]
{kind=link}
{kind=link}
3.2 Executing with the command line[edit source]
The Python script objdetect_tfl_edgetpu.py application is located in the userfs partition:
/usr/local/demo-ai/computer-vision/tflite-object-detection-edgetpu/python/objdetect_tfl_edgetpu.py
It accepts the following input parameters:
usage: objdetect_tfl_edgetpu.py [-h] [-i IMAGE] [-v VIDEO_DEVICE] [--frame_width FRAME_WIDTH] [--frame_height FRAME_HEIGHT]
[--framerate FRAMERATE] [-m MODEL_FILE] [-l LABEL_FILE] [--lib_edgetpu {max,throttled}]
[--input_mean INPUT_MEAN] [--input_std INPUT_STD] [--top_k TOP_K]
optional arguments:
-h, --help show this help message and exit
-i IMAGE, --image IMAGE
image directory with image to be classified
-v VIDEO_DEVICE, --video_device VIDEO_DEVICE
video device (default /dev/video0)
--frame_width FRAME_WIDTH
width of the camera frame (default is 320)
--frame_height FRAME_HEIGHT
height of the camera frame (default is 240)
--framerate FRAMERATE
framerate of the camera (default is 15fps)
-m MODEL_FILE, --model_file MODEL_FILE
.tflite model to be executed
-l LABEL_FILE, --label_file LABEL_FILE
name of file containing labels
--lib_edgetpu {max,throttled}
Choose the version of your EdgeTPU runtime
--input_mean INPUT_MEAN
input mean
--input_std INPUT_STD
input standard deviation
--top_k TOP_K The top_k classes to show
3.3 Testing with COCO SSD MobileNet V1[edit source]
The model used for test is the detect_edgetpu.tflite downloaded from the object detection overview[2] and converted for the Coral Edge TPU. If you are interested, please take a look at how this model has been converted.
To ease launching of the application, two shell scripts are available:
- launch object detection based on camera frame inputs
/usr/local/demo-ai/computer-vision/tflite-object-detection-edgetpu/python/launch_python_objdetect_tfl_edgetpu_coco_ssd_mobilenet.sh
- launch object detection based on the pictures located in /usr/local/demo-ai/computer-vision/models/mobilenet/testdata directory
/usr/local/demo-ai/computer-vision/tflite-object-detection-edgetpu/python/launch_python_objdetect_tfl_edgetpu_coco_ssd_mobilenet_testdata.sh
4 References[edit source]